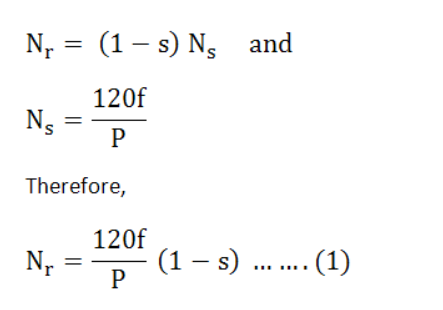
ইন্ডাকশন মোটরের স্পিড কন্ট্রোলের অনেকগুলো পদ্ধতি রয়েছে। তার মধ্যে অন্যতম একটি পদ্ধতি হল পোল সংখ্যা পরিবর্তনের মাধ্যমে স্পিড কন্ট্রোল। ইন্ডাকশন মোটরের স্পিড কন্ট্রোলের জন্য এটি অতি প্রাচীনতম একটি পদ্ধতি। ১৮৯৭ সালে এই মেথডটি আবিষ্কৃত হয়। এই মেথডটি খুবই প্রাচীন হলেও বহুল ব্যবহৃত ছিলো। তবে এখন আর ব্যবহার হয় না বললেই চলে। আপনারা হয়ত ভাবতে পারেন পোল সংখ্যা কিভাবে মোটরের স্পিডের সাথে সম্পর্কিত। এ বিষয়টি জানার জন্য চলুন রোটর স্পিডের সূত্রটি দেখে নেই।
এখানে,
NR = রোটর স্পিড
NS = স্ট্যাটর স্পিড
S = মোটরের স্লিপ
P = পোল সংখ্যা
সুতরাং মোটরের পোল সংখ্যা (P) রোটর স্পিডের ব্যাস্তানুপাতিক। অর্থাৎ মোটরের পোল সংখ্যা যত কমবে, রোটর স্পিড তত বাড়বে। বিস্তারিত পড়তে এই লিংকে ক্লিক করুন।
পোল শব্দের অর্থ হচ্ছে মেরু। ইন্ডাকশন মোটরের পোল বলতে স্ট্যাটরে বিদ্যুৎ প্রবাহের ফলে যে চৌম্বকক্ষেত্রে সৃষ্টি হয় তাকেই বোঝায়। মোটরের পোল মূলত একটি ধ্রুব সংখ্যা আর এই সংখ্যার পরিবর্তনের মাধ্যমেই মোটরের স্পিড কন্ট্রোল করা যায়। পোল সংখ্যা পরিবর্তনের মাধ্যমে স্পিড কন্ট্রোল করার জন্য দুটি পদ্ধতি রয়েছে। যথাঃ
- The Method of Consequent Poles
- Multiple Stator winding
The Method of Consequent Poles
Consequent Poles মেথডে মোটরের পোলের সংখ্যাকে ২:১ অনুপাতে পরিবর্তন করা যায়। অর্থাৎ মোটরের কয়েল কানেকশনে সামান্য পরিবর্তনের মাধ্যমে আগে যে পোল সংখ্যা ছিল পরে তার দ্বিগুণ পোল সংখ্যা তৈরি করা যায় এ পদ্ধতিতে। আর পোল সংখ্যার এই পরিবর্তনের উপর ভিত্তি করে মোটরের স্পিড কন্ট্রোল করা সম্ভব হয়।
চিত্রে একটি থ্রি ফেইজ ইন্ডাকশন মোটরের সিঙ্গেল ফেইজ কয়েলকে দেখানো হয়েছে।
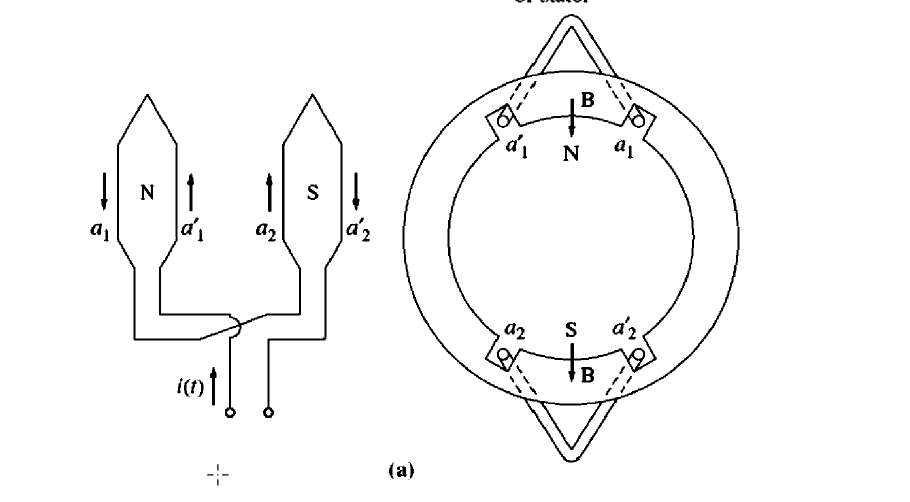
চিত্র (a) হচ্ছে মোটরের স্বাভাবিক অবস্থা। এতে চোম্বক ক্ষেত্র নর্থ পোল দিয়ে স্ট্যাটর ত্যাগ করছে এবং সাউথ পোল দিয়ে স্ট্যাটরে প্রবেশ করছে। সুতরাং বলা যায় এটি একটি ২ পোলের মোটর। এখন আমরা দেখবো কিভাবে এই ২ পোলের মোটোরটিকে ৪ পোলে রূপান্তর করা যায়।
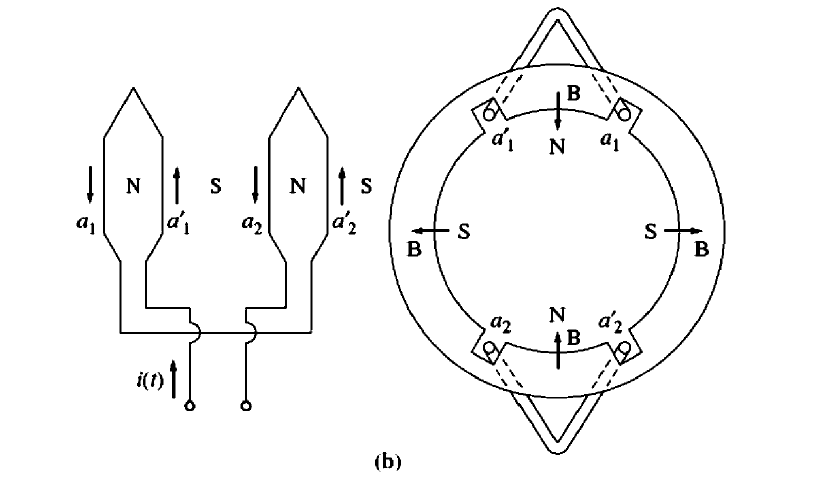
আমরা যদি চিত্র (b) এর মত করে কয়েলের মধ্যকার কারেন্টের কানেকশনকে উল্টা করে দেই, তাহলে মোটরের উভয় পোলই নর্থ পোলে পরিণত হবে। আর উভয় পোল দিয়েই চৌম্বক ক্ষেত্র স্ট্যাটর ত্যাগ করবে। কিন্তু আমরা জানি মোটর চলতে হলে সর্বনিম্ন ২টি ভিন্ন ভিন্ন পোল লাগবে। অর্থাৎ একটি নর্থ পোল হলে অপরটিকে অবশ্যই সাউথ পোল হতে হবে। তাই এখানে নর্থ পোলগুলো তাদের পরিপূরক একটি করে সাউথ পোল তৈরি করবে। চিত্র (b) তে খেয়াল করলে দেখা যাবে সেখানে প্রতিটি নর্থ পোলের সাথে একটি করে সাউথ পোল তৈরি হয়েছে। অর্থাৎ বর্তমানে মোটরের পোল সংখ্যা আগের পোল সংখ্যার দ্বিগুণ।
The Method of Consequent Poles এর মাধ্যমে মোটরের স্পিডে ৩টি অবস্থা তৈরি হতে পারে। যেমনঃ
- মোটরের স্পিড পূর্বের স্পিডের সমান থাকবে
- মোটরের স্পিড পূর্বের স্পিডের দ্বিগুণ হবে
- মোটরের স্পিড পূর্বের স্পিডের অর্ধেক হবে
এবং এই অবস্থাগুলো নির্ভর করবে, কয়েল কানেকশনের উপর। শুধুমাত্র এই একটি মেথড ব্যবহার করে আমরা ৩টি ভিন্ন ভিন্ন স্পিডের ইন্ডাকশন মোটর তৈরি করতে পারি।
Multiple Stator winding
Consequent Poles মেথডের প্রধান অসুবিধা হল এই মাধ্যমে মোটরের স্পিড সব সময় ২:১ অনুপাতে পরিবর্তন করা যায়। কিন্তু আমাদের আরো ভিন্ন ভিন্ন স্পিডের প্রয়োজন হতে পারে। তাই এই অসুবিধাকে সমাধান করার জন্যই Multiple Stator winding মেথড উদ্ভাবন করা হয়।
Multiple Stator winding মেথডে মোটরের স্ট্যাটরে ২ বা ততোধিক ভিন্ন ভিন্ন পোলের স্ট্যাটর কয়েল যুক্ত থাকে এবং প্রয়োজন অনুসারে যেকোন একটিতে বিদ্যুৎ সংযোগ দেয়া যায়। অর্থাৎ মোটরে একের অধিক স্ট্যাটর কয়েল থাকবে এবং প্রত্যেকটির পোল সংখ্যা ভিন্ন ভিন্ন হবে। যেমনঃ একটি মোটরে যদি ৪ পোল এবং ৮ পোলের দুইটি কয়েল থাকে এবং সাপ্লাই ফ্রিকোয়েন্সি যদি ৬০ হার্জ হয় তাহলে মোটরটির সিনক্রোনাস স্পিড হবে যথাক্রমে ১৮০০ rpm এবং ১২০০ rpm। (যেহেতু মোটরের স্পিড পোল সংখ্যার ব্যস্তানুপাতিক)
এখন মোটরটিতে যদি The Method of Consequent Poles এবং Multiple Stator winding একত্রে ব্যবহার করা হয় তাহলে একই মোটরের মাধ্যমে ৪টি ভিন্ন ভিন্ন স্পিড পাওয়া সম্ভব হবে কারণ multiple Stator winding-এ ২টি কয়েল থাকবে আর The Method of Consequent Poles এর মাধ্যমে প্রতিটি কয়েলের পোলকে আবার ২:১ অনুপাতে পরিবর্তন করা যাবে। যদি একটি মোটরে ৪ পোল এবং ৮ পোলের দুটি কয়েল থাকে তাহলে সেই মোটর থেকে ৬০০ rpm, ৯০০ rpm, ১২০০ rpm এবং ১৮০০ rpm এই ৪টি স্পিড পাওয়া যাবে।
মূলত এই দুই উপায়েই পোল সংখ্যা পরিবর্তন করে মোটরের স্পিড কন্ট্রোল করা হয়ে থাকে।
ইন্ডাকশন মোটর সম্পর্কে অন্যান্য লেখা সমূহঃ
ইন্ডাকশন মোটরঃ প্রকারভেদ এবং গঠন
থ্রী ফেইজ ইন্ডাকশন মোটরের কার্যপদ্ধতি



{kind=link}